MEM-Bus EtherCAT®
1 /2Pagine

MEM-Bus EtherCAT®
1 /2Pagine
Estratti del catalogo

► ENCODER ASSOLUTI CON BUS DI CAMPO ImEM620-BUS , EtherCAT Conformance tested Seleziona il MODELLO [ ] MEM620-Bus - Flangia quadrata 63.5 x 63.5 mm [ ] MEM540-Bus - Flangia tonda diametro 58 mm CLAMPING FLANGE [ ] MEM520-Bus - Flangia tonda diametro 58 mm SYNCHRO FLANGE [ ] MEM440-Bus - Albero cavo per montaggio su albero motore [ ] MEM450-Bus - Albero cavo, fissaggio con supporto elastico r ► PROTOCOLLO DI COMUNICAZIONE EtherCAT , Basata sul protocollo di comunicazione Ethernet, L’interfaccia EtherCAT® è stabile, versatile e veloce, particolarmente adatta alla comunicazione tra sistemi di controllo e periferiche come, ad esempio, sensori e attuatori. Gli encoder MEM-BUS EtherCAT® offrono: • Comunicazione Real Time • Numero di nodi flessibile • Semplicità di installazione e cablaggio • Configurazione topologie di rete • Indirizzamento automatico degli Slave • Programmazione flessibile dei range di lavoro Prodotto certificato EtherCAT^ Conformance tested NUMERO GIRI [ ] M - Multigiro Seleziona il DIAMETRO ALBERO/FORO [ ] 6 mm [ ] 8 mm [ ] 10 mm [ ] 12 mm [ ] 14 mm [ ] 15 mm MEM540-BUS_ECT_M_6 jpROFILO ENCODER MEM-BUS EtherCAT _j • Rif IEC61158-1-6 & IEC61784-2 • Profilo del dispositivo CANopen su EtherCAT (CoE), CiA DS-406 • Livello fisico EtherCAT 100Base-TX, Fast Ethernet, ISO/IEC 8802-3 • Codifica dati in uscita: binaria • Tempo di ciclo >1 ms • Velocitò di trasmissione 100 Mbit/s • Trasmissione: Cavo CAT-5, schermato (STP), ISO/IEC 11801 Connettori porte IN e OUT Tipo M12 femmina D code CONNETTORE ALIMENTAZIONE Tipo M12 maschio A code • Direzione del conteggio • Valore di preset • Numero di passi per giro • Unità di misura della velocità • Intervallo di misura globale L'encoder MEM-BUS EtherCAT® supporta diverse modalità di funzionamento • Free-Run: Modalità asincrona in cui il campionamento dei dati viene effettuato in modo ciclico, secondo un timer interno all'encoder; il tempo di ciclo può essere modificato dal Master, ma questo ciclo è comunque indipendente dal ciclo della comunicazione e dal ciclo del Master. • SM3 Event: modalità sincrona in cui i dati sono campionati e successivamente resi disponibili non appena i dati precedenti sono stati letti dal Master (evento SM); quindi i nuovi valori campionati risultano sincroni con le letture da parte del Master. • DC: modalità a clock distribuiti in cui i dati sono campionati e successivamente resi disponibli in corrispondenza del segnale SYNC0, generato dall’unità di capture/compare dell'ESC (EtherCAT Slave Controller). La modalità DC assicura alte prestazioni real-time
Aprire il catalogo a pagina 1
EtherCAT. Conformance tested «ALBERO DISPONIBILE NEI 0 8-10 lunghezza 20mm 6 lunghezza lOmm «ALBERO DISPONIBILE NEI 0 8-10 lunghezza 20mm 6 lunghezza lOmm encoder assoluti con bus di campo Via Vittorio Veneto, 4 - 20094 Corsico (Mi) tel. +39 02 451.95.61 - fax +39 02 45.10.34.06 [email protected] - www.elap.it
Aprire il catalogo a pagina 2Tutti i cataloghi e le schede tecniche ELAP
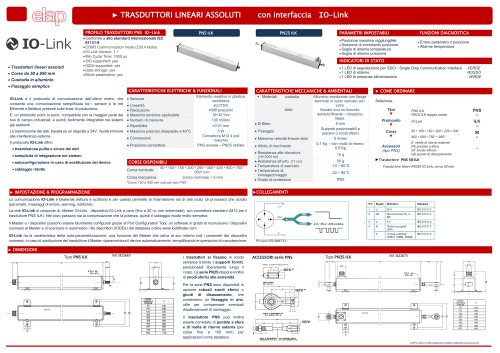 PNS PN2S IO-Link trasduttori lineari
PNS PN2S IO-Link trasduttori lineari2 Pagine
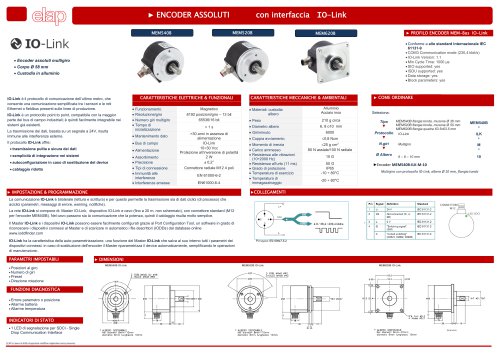 MEM-Bus IO-Link Absolute Encoder
MEM-Bus IO-Link Absolute Encoder2 Pagine
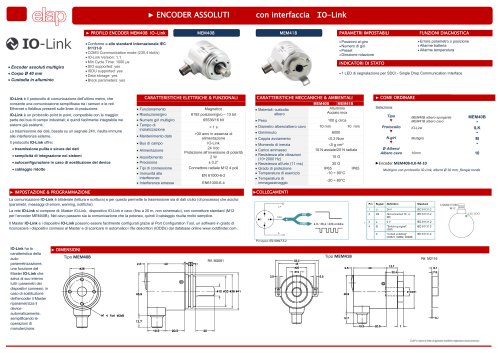 MEM 40B Encoder Assoluto IO-Link
MEM 40B Encoder Assoluto IO-Link2 Pagine
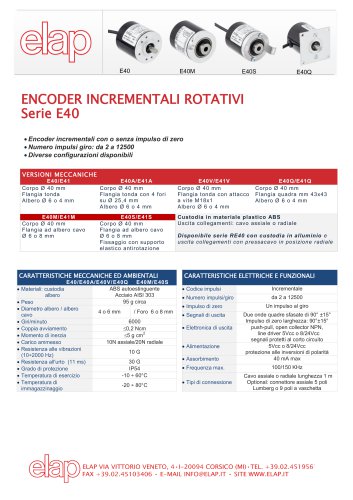
 RE40 Encoder incrementale
RE40 Encoder incrementale4 Pagine
 Encoder Assoluti SSI serie MEM
Encoder Assoluti SSI serie MEM2 Pagine
 ENCODER ASSOLUTI & INCREMENTALI
ENCODER ASSOLUTI & INCREMENTALI20 Pagine
 Potenziometri lineari
Potenziometri lineari12 Pagine
 Elap Catalogo
Elap Catalogo12 Pagine
 MEM-Bus Profibus Encoder
MEM-Bus Profibus Encoder2 Pagine
 PT, PT2S Potenziometri lineari
PT, PT2S Potenziometri lineari4 Pagine
 PR PR2S Potenziometri lineari
PR PR2S Potenziometri lineari4 Pagine
 PM PM2S Potenziometri Lineari
PM PM2S Potenziometri Lineari4 Pagine
 VD3 Visualizzatori digitali
VD3 Visualizzatori digitali1 Pagina
 MEM-Bus Profinet ELAP
MEM-Bus Profinet ELAP2 Pagine
 Encoder MEM-Bus EtherNet/IP
Encoder MEM-Bus EtherNet/IP2 Pagine
 HLS Encoder a filo
HLS Encoder a filo2 Pagine
 HPS Potenziometro a filo
HPS Potenziometro a filo2 Pagine
 MEM-Bus CANopen Encoder Assoluti
MEM-Bus CANopen Encoder Assoluti4 Pagine
 KP Righe ottiche
KP Righe ottiche2 Pagine
 KD Righe ottiche
KD Righe ottiche2 Pagine
 SEB Encoder incrementale
SEB Encoder incrementale2 Pagine
 RE50 encoder incrementale
RE50 encoder incrementale2 Pagine
 Catalogo generale Elap
Catalogo generale Elap12 Pagine
 REV incremental encoders
REV incremental encoders4 Pagine
 VD4 Indicatore Digitale
VD4 Indicatore Digitale2 Pagine
 CM78 Contatore Programmabile
CM78 Contatore Programmabile1 Pagina














Cataloghi archiviati
- Encoder rotativo
- Encoder incrementale
- Encoder rotativo incrementale
- Indicatore digitale
- Encoder rotativo assoluto
- Indicatore ad incasso
- Sensore di posizione
- Encoder rotativo ad albero pieno
- Encoder rotativo ottico
- Encoder rotativo ad albero cavo
- Sensore di posizione lineare
- Encoder rotativo magnetico
- Encoder rotativo ad uso industriale
- Sistema di sensore di spostamento
- Sensore di spostamento lineare
- Encoder rotativo IP67
- Encoder rotativo compatto
- Encoder rotativo IP65
- Sensore di posizione analogico