MPO
1 /10Pagine

MPO
1 /10Pagine
Estratti del catalogo

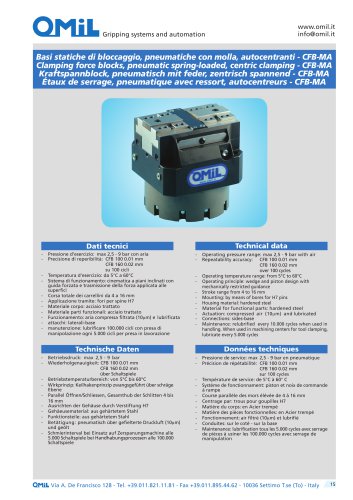
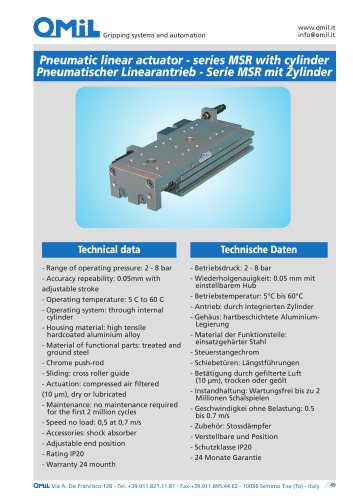
wm. omil.it info@ (dmil.it Gripping systems and automation - Range of operating pressure: 2 - 8 bar - Repeatability accuracy: MPO 030 ... 125 0.01 mm; MPO - 160 0.02 mm over 100 cycles - Operating temperature: from -10°C to 90°C; version up to 130°C upon request - Operating principle: wedge-hook kinematics - Housing material: high tensile hard-coated aluminium alloy, hard-anodized - Material of functional parts: treated ground steel - Actuation: pneumatic, with filtered compressed air (10 pm): dry, lubricated or non-lubricated (DIN ISO 8573-1: 644) - Maintenance: no maintenance required for the first 1.5 million cycles - Suitable for internal/external gripping - Maximum permitted finger offset page 17 - Layout finger connection page 18 - Air connections: sides and base - M5 pressurisation on both sides - Wiederholgenauigkeit: MPO 030...125 0.01 mm; MPO - 160 0.02 mm uber 100 Schaltspiele - Betriebstemperaturbereich von -10°C bis 90°C; bis 130°C und hoher auf Anfrage - Kinematik: Keilhakenprinzip zwangsgefuhrt uber schrage Ebene - Material: Gehause aus hochfester Aluminiumlegierung hartbeschichtet, Funktionsteile aus gehartetem Stahl - Betatigung: pneumatish, uber gefilterte Druckluft (10 pm): trocken, geolt oder ungeolt (DIN ISO 8573-1: 644) - Fur Innen-und AuBengreifen geeignet - Diagram der empfohlenen Hebel und Fingerlangen Seite 17 - AnschlussmaBe der Grundbacken Seite 18 - Druckluftanschlusse: uber die Seitenflachen-Grundflachen QMiL Via A. De Francisco 128- Tel. +-39.011.8211.11.81 - Fax +-39.011.895.44.62 - 10036 Settimo T.se (To) - Italy
Aprire il catalogo a pagina 1
Gripping Gripping systems systems and automation and automation www.omil.it www.omil.it [email protected] [email protected] 2-finger parallel grippers, pneumatic - series MPO 2-Finger-Parallelgreifer, pneumatisch - Typ MPO NOTE: - The part does not allow adjustment of the proximity that controls opening/closing - Proximity “A” controls closing from the start to the middle of the stroke - Proximity “B” controls opening from the middle to the end of the stroke 20 ANMERKUNG: - Reine Endlagen abfrage ohne Einstellbarkeit - Näherungsschalter A von Hubbeginn bis Hubmitte - Näherungsschalter B von Hubmitte bis...
Aprire il catalogo a pagina 2
www.omil.it www.omil.it [email protected] [email protected] Max Stroke Mass Moment Recommended Total air for Max Approx. time (s) Max Gripping force Max Ma Stroke Stroke Moment Recommended Moment Recommended finger Total air for Total air air forstroke Approx. time Approx. (s) (s) finger time (s) time Stroke Stroke Moment Moment Recommended Recommended Total for Total air for for Type Gripping of inertia weight of part double Mass Mass force Gripping force Approx. time Approx. (s) finger Mass Mass Gripping force Gripping force (Kg) at 6 (N) finger fing for for Type Type of inertia weight of part of weight...
Aprire il catalogo a pagina 3
Gripping Gripping systems systems and automation and automation www.omil.it www.omil.it [email protected] [email protected] 2-finger parallel grippers, pneumatic - series MPO 2-Finger-Parallelgreifer, pneumatisch - Typ MPO Via A. Via De Francisco A. De Francisco 128 - Tel. 128+39.011.821.11.81 - Tel. +39.011.821.11.81 - Fax +39.011.895.44.62 - Fax +39.011.895.44.62 - 10036- 10036 Settimo Settimo T.se (To) T.se - Italy (To) - Italy
Aprire il catalogo a pagina 4
wm. omil.it info@ (dmil.it Gripping systems and automation Transportable weight calculated with ^ = 0.1 and fs = 2. With form-fit gripping the mass may be greater. The gripping force is the arithmetic sum of the individual forces created at the fingers at "l" mm distance at 6 bar Finger weight in Kg. Empfehlung fur max. Werkstuckgewicht gerechnet mit ^ = 0.1 fs = 2 . Bei Formschluss sind groBere Massen moglich. Die Greifkraft ist die arithmetische Summe der an den Greifbacken auftretenden Einzelkrafte im Abstand "l" in mm bei 6 bar Eigenmasse in Kg. QMiL Via A. De Francisco 128- Tel. +39.011.821.11.81...
Aprire il catalogo a pagina 5
Gripping Gripping systems systems and automation and automation www.omil.it www.omil.it [email protected] [email protected] 2-finger parallel grippers, pneumatic - series MPO 2-Finger-Parallelgreifer, pneumatisch - Typ MPO Via A. Via De Francisco A. De Francisco 128 - Tel. 128+39.011.821.11.81 - Tel. +39.011.821.11.81 - Fax +39.011.895.44.62 - Fax +39.011.895.44.62 - 10036- 10036 Settimo Settimo T.se (To) T.se - Italy (To) - Italy
Aprire il catalogo a pagina 6
wm. omil.it info@ (dmil.it 2-finger paratie! grippers, pneumatic - series MPO 2-Finger-Parallelgreifer, pneumatisch - Typ MPO Type Transportable weight calculated with p = 0.1 and fs = 2. With form-fit gripping the mass may be greater. The gripping force is the arithmetic sum of the individual forces created at the fingers at "l" mm distance at 6 bar Finger weight in Kg. Empfehlung fur max. Werkstuckgewicht gerechnet mit p = 0.1 fs = 2 . Bei Formschluss sind groBere Massen moglich. Die Greifkraft ist die arithmetische Summe der an den Greifbacken auftretenden Einzelkrafte im Abstand "l" in mm...
Aprire il catalogo a pagina 7
Gripping systems and automation The indicatedforceandmomentarestaticvalues,applyperbase jaw and may occur simultaneously. MR may arise in additional to the moment generated by thegrippingforceitself. | Allowed load data Die angegebenen Krafte und Momente sind statische Werte, gelten je Grundbacke und durfen gleichzeitig auftreten. MR darf zusatzlich zu dem durch die Greifkraft erzeugten Moment auftreten.
Aprire il catalogo a pagina 8
www.omil.it www.omil.it [email protected] [email protected] Gripping systems and automation Gripping systems and automation 2-finger parallel grippers, pneumatic - series MPO 2-Finger-Parallelgreifer, pneumatisch - Typ MPO Force at 6 bar in N at I mm Greifkraft (N) in Abhängigkeit der Fingerlänge “l” (mm) bei 6 bar MPO 040 030 MPO 27 De Francisco 128+39.011.821.11.81 - Tel. +39.011.821.11.81 - Fax +39.011.895.44.62 - 10036 Settimo T.se- Italy (To) - Italy Via A. Via De A. Francisco 128 - Tel. - Fax +39.011.895.44.62 - 10036 Settimo T.se
Aprire il catalogo a pagina 9
Gripping systems and automation NOTE: Minimum operating pressure 4.5 bar. Upon request versions with less pressure; in this case the spring force will be lower. Gripping force = pneumatic gripping force + spring force. The gripping force is the arithmetic sum of the individual forces of the fingers. Bemerkung: Betriebsdruck mindestens 4.5 bar Die Greifkraft ergibt sich aus der pneumatischen Greifkraft + Federkraft Die Greifkraft ist die arithmetische Summe der an den Greifbacken auftretenden Einzelkrafte im Abstand “l" bei 6 bar 28 QMU. Via A. De Fra ncisco 1218! - Tel. +39.011.821.11.8 1 - Fax...
Aprire il catalogo a pagina 10Tutti i cataloghi e le schede tecniche OMIL
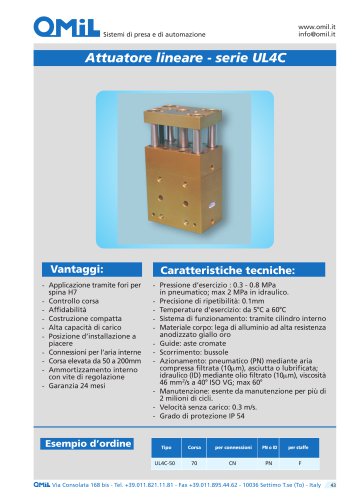 UL4C
UL4C2 Pagine
 PZP
PZP24 Pagine
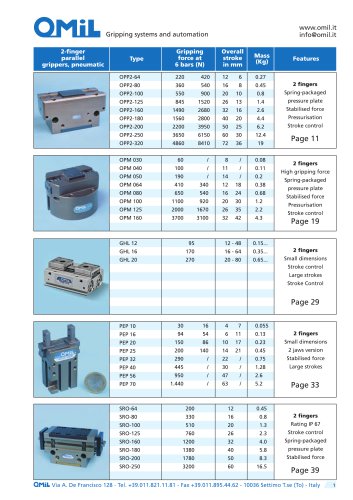
 OPP
OPP8 Pagine
 PLE
PLE4 Pagine
 PLG
PLG12 Pagine
 PEP
PEP6 Pagine
 GSO
GSO14 Pagine
 serie PGP
serie PGP24 Pagine
 KSB
KSB4 Pagine
 MAP
MAP4 Pagine
 ARP
ARP4 Pagine
 GPR
GPR4 Pagine
 GAP
GAP4 Pagine
 MCL
MCL4 Pagine
 GZO
GZO10 Pagine
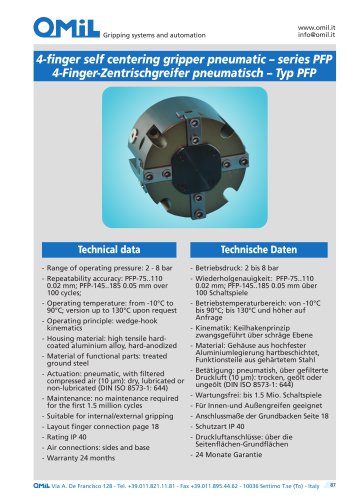 PFP
PFP6 Pagine
 FRM
FRM4 Pagine
 FBM
FBM8 Pagine
 C160
C1602 Pagine
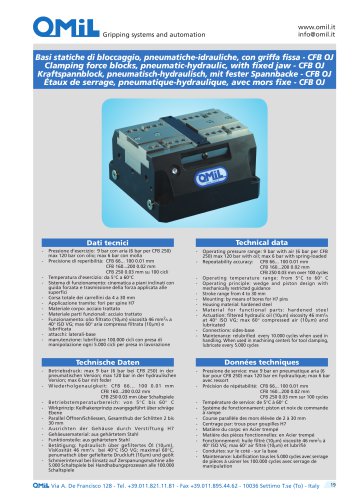
 CFB
CFB6 Pagine
 PAO
PAO6 Pagine
 ARPEP
ARPEP7 Pagine
 MA4
MA46 Pagine
 GPL 2-finger parallel gripper
GPL 2-finger parallel gripper4 Pagine
 OPP 2 2-finger parallel gripper
OPP 2 2-finger parallel gripper8 Pagine
 Stationary Clamping Systems
Stationary Clamping Systems72 Pagine
 Gripping-Systems
Gripping-Systems174 Pagine
 CFB-OJ
CFB-OJ8 Pagine
 CFB-MA
CFB-MA4 Pagine
 CFB-MC
CFB-MC4 Pagine
 MSR
MSR6 Pagine
 MIA1-G2
MIA1-G26 Pagine
 MFA
MFA4 Pagine
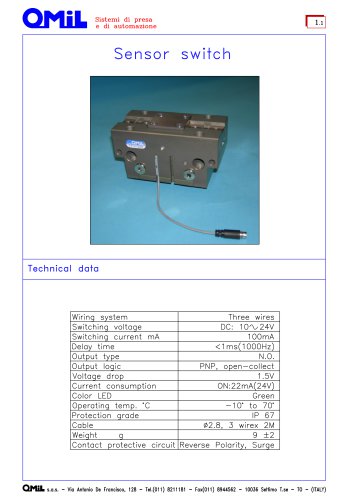 Sensor switch
Sensor switch2 Pagine
 MPAF/4
MPAF/44 Pagine
 MAS-G3
MAS-G34 Pagine
 PBA
PBA4 Pagine
 AL
AL6 Pagine
 OPLE
OPLE4 Pagine
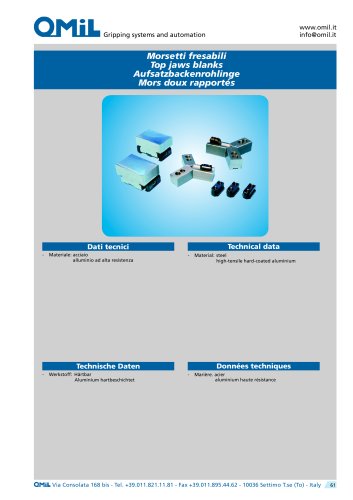 Top jaws blanks
Top jaws blanks6 Pagine
 Pneumatic clamping tombstone
Pneumatic clamping tombstone2 Pagine
 MCB
MCB6 Pagine
 MG
MG6 Pagine
 TC-PAO
TC-PAO6 Pagine
 PAO-MC
PAO-MC4 Pagine
 PGC
PGC6 Pagine
 PLA
PLA2 Pagine
 MFB/4
MFB/44 Pagine
 GPS 4
GPS 44 Pagine
 MFB
MFB8 Pagine
 GPS 3
GPS 34 Pagine
 MAC 3
MAC 38 Pagine








- Valvola Bourn And Koch
- Valvola manuale Bourn And Koch
- Cilindro
- Attuatore
- Attuatore lineare
- Cilindro a doppio effetto
- Cilindro pneumatico
- Morsa
- Pinza di presa pneumatica
- Morsa di macchina
- Attuatore compatto
- Attuatore a vite
- Cilindro a pistone
- Pinza di presa parallela
- Pinza di presa a 2 griffe
- Cilindro compatto
- Morsa per macchina utensile
- Attuatore rotativo
- Contatto di fine corsa
- Cilindro in lega d'alluminio